Материалы для обучения "Bизуальная среда программирования роботов"
14.05.2020, 12:33
Движение по линии с двумя датчиками света (часть 3)
Посмотри видео, изучи программу и выполни ее (не забывайте высылать фото или видео вашей работы).
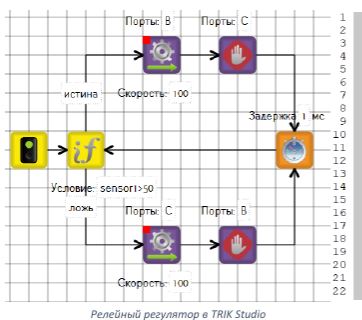
Релейный регулятор
В основе работы релейного регулятора лежит, как понятно из названия, реле. Т.е. данный регулятор работает по принципу, либо вкл., либо выкл. Он меряет датчиком света текущие показания и сравнивает их с исходными. Если текущие показания больше исходных – работает только правое колесо, если меньше – левое.
Вот так должна выглядеть программа:
С помощью условия мы проверяем показания на датчике. Если они больше среднего значения (серого), значит датчик находится на белом, поэтому робот включает «мотор B» и выключает «мотор С». Если же показания меньше серого, то наоборот. Не забываем про таймер, мы должны не только дать роботу команду «ехать», но и выделить время на выполнение данной команды. В TRIK Studio нужно не забыть установить на стрелочки надписи «Истина и Ложь». Для этого нужно зайти в редактор свойств, нажав перед этим на нужную стрелочку, после чего выбрать требуемый пункт.
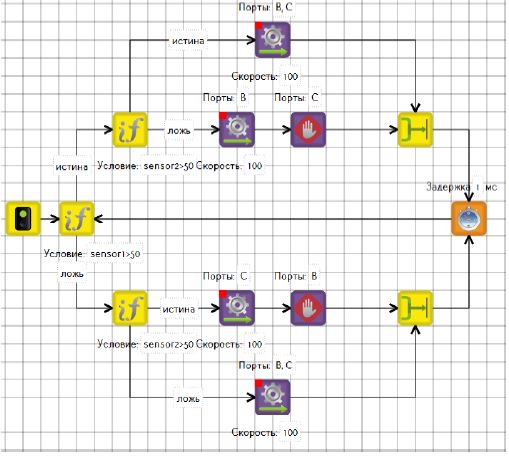
Теперь попробуем написать такую же программу, но для двух датчиков сразу. Для этого нам нужно добавить еще два условия: для каждого из вариантов первого ветвления. Т.е. мы проверяем, показания на первом датчике, а потом, не зависимо от результатов, проверяем на втором. Получается 4 варианта: ЧЧ, ЧБ, БЧ, ББ. Если оба датчика на черном или на белом, значит робот стоит на линии стабильно (просто датчики либо очень узко стоят, либо широко). В этом случае нужно просто ехать прямо. А вот если ЧБ или БЧ, значит робот сейчас поворачивает и один его датчик видит линию, а другой нет. В этом случаем мы пишем все так, как было в предыдущей программе.
Устанавливаем второй сенсор и пишем программу.
Не забываем, что в TRIK Studio каждое условие должно завершаться значком «Конец условия» или «Таймер». Но, так как «таймер» нужен всего один, а «условия» три, то у нас появляется 2 значка. По правилам хорошего тона принято ставить все «концы условий» ровно напротив самих «условий».
Проверка знаний
Все результаты (фото или скриншот) можно высылать мне на Мессенджер Вацап / Вайбер с указанием Фамилии учащегося или на электронную почту ketrin-spc@mail.ru