П-регулятор. Движение по линии с одним датчиком света (часть 4)
Пропорция – это равенство отношений двух и более пар чисел. Т.е. если есть числа 50 и 25, то их пропорциональное отношение будет 2 к 1, т.к. 50 в два раза больше, чем 25.
Наш регулятор будет мерить пропорции черного и белого. Если релейный просто говорит, что мы сейчас видим больше или меньше среднего числа, то пропорциональный скажет насколько больше или меньше. И повернет робота не с одинаковой скоростью, а ровно с той, с которой это сейчас требуется.
Для начала мы изучим все программы на одном датчике света. В TRIK Studio можно перед тем, как вписывать формулы, создать каркас программы.

В моторе «В» это будет (v+u), а в моторе «С» (v-u).
v – это скорость.
u – управляющее воздействие.
Во второй функции мы пишем все основные формулы. В случае с пропорциональным регулятором их будет всего две:
err=sensor1-grey1;
u=err*kp.
Для перехода на следующую строчку нужно нажать кнопку Enter с зажатой кнопкой Shift.
err - это ошибка, то есть любое отклонение от края.
grey1 - значение серого (порт 1).
sensor1 - значение сенсора (датчик света) порт 1.
kp - это коэффициент усиления регулятора.
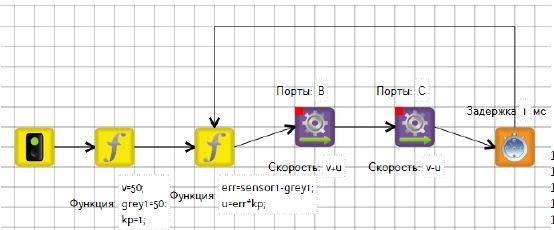
В первую «функцию» нужно внести все начальные показания. То есть мы берем все переменные из второй функции и из моторов и записываем, что в них должно быть вначале программы:
Порт В. Скорость = v+u
Порт С. Скорость = v-u
v= 50;
grey1=50;
kp=1
Для просмотра видео занятия пройти по ссылке (ссылка)
|